|

|
Example 1
A classical spur cylindrical gear set for motion transmission between parallel axes. The tooth profile is a standard involute tooth profile.
Back to top
|
|

|
Example 2
A helical cylindrical gear set for motion transmission between parallel axes. The axial contact ratio is 1.5.
Back to top
|
|

|
Example 3
A helical cylindrical gear set for motion transmission between parallel axes. The input spiral or helix is right hand whereas left hand in the previous example.
Back to top
|
|

|
Example 4
A crossed axis gear set for motion transmission between skew axes. The tooth profile is a standard involute tooth profile.
Back to top
|
|

|
Example 5
A spiral bevel gear set for motion transmission between intersecting axes. The tooth profile is a standard involute tooth profile.
Back to top
|
|

|
Example 6
A left-hand spur hyperboloidal gear set for motion transmission between skew axes. The tooth profile is a standard involute tooth profile.
Back to top
|
|

|
Example 7
A left hand spiral hyperboloidal gear set for motion transmission between skew axes. The tooth profile is a standard involute tooth profile.
Back to top
|
|

|
Example 8
A right hand spiral hyperboloidal gear set for motion transmission between skew axes. The input spiral is right hand whereas the generators are left hand. Further, the input spiral (right hand) is in opposite direction of the generators.
Back to top
|
|

|
Example 9
A right hand spur hyperboloidal gear set for motion transmission between skew axes. The tooth profile is a standard involute tooth profile.
Back to top
|
|

|
Example 10
A right hand spiral hyperboloidal gear set for motion transmission between skew axes. The tooth profile is a standard involute tooth profile.
Back to top
|
|

|
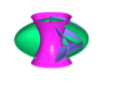
Example 11
A high ratio hyperboloidal gear set for constant motion transmission between skew axes. The tooth profile is a standard involute tooth profile.
Back to top
|
|

|
Example 12
A helical gear set for constant motion transmission between skew axes. The angle between the axes is “small”.
Back to top
|
|

|
Example 13
A left hand spur hyperboloidal gear set for motion transmission between skew axes.
Back to top
|
|

|
Example 14
A right angle gear pair with five teeth on the input gear and 16 teeth on the output gear where the speed reduction ratio is exactly 3.20. profile.
Back to top
|
|

|
Example 15
A left hand spiral hyperboloidal gear set for motion transmission between skew axes. The tooth profile is a stub tooth profile.
Back to top
|
|

|
Example 16
A left hand spiral hyperboloidal gear set for motion transmission between skew axes. The face width high is with stubby teeth.
Back to top
|
|

|
Example 17
An internal-external helical cylindrical gear set for constant motion transmission between parallel axes.
Back to top
|
|

|
Example 18
An internal-external gear set for constant motion transmission between skew axes.
Back to top
|
|

|
Example 19
A single start worm gear set for constant motion transmission between non-orthogonal axes. The generators are left hand and the input tooth spiral is left hand.
Back to top
|
|

|
Example 20
A worm gear set for constant motion transmission between orthogonal axes. The worm has six starts. The generators and the tooth spiral is right hand.
Back to top
|
|

|
Example 21
A spiral non-circular gear set for variable motion transmission between parallel axes.
Back to top
|
|

|
Example 22
A spur hyperboloidal non-circular gear set for elliptic motion transmission between skew axes.
Back to top
|